Первые опыты - самолеты
Идея убрать человека от управления транспортом впервые пришла к авиаконструкторам, а не автопроизводителям. Это неудивительно: в воздухе нет пробок и меньше препятствий. Разумеется, сперва ставили опыты с дистанционным управлением, а полноценный автопилот затестили значительно позже. Вот ключевые моменты зарождения автопилота в авиации:
- 1915 — 1918 годы — «Siemens & Halske» произвели больше сотни дистанционно управляемых по проводам планеров, запускаемых как с земли, так и с дирижаблей. Они несли бомбовую нагрузку до 1000 кг. Позже на основе этих наработок был спроектирован бомбардировщик «Летучая мышь» с радиусом действия до 200 км.
- 1924 год — гидросамолет Curtiss F-5L совершил первый целиком радиоуправляемый полет с маневрированием и посадкой на воду.
- Период второй мировой войны — немецкие ученые разрабатывали радиоуправляемые типы оружия. ВМФ США — производили БПЛА-мишени и боевые БПЛА (беспилотные летательные аппараты) одноразового использования, а также управляемые радиобомбы.
- 1947 год — американский военно-транспортный самолет В-54 совершил трансатлантический перелет полностью на автопилоте, даже взлет и посадка производились без участия человека.
- Период холодной войны — в СССР были созданы реактивные беспилотные самолеты-разведчики Ту-123 «Ястреб», Ту-141 «Стриж» и Ту-143 «Рейс», способные взлетать с мобильных наземных комплексов; США разработал первый БПЛА-вертолет для борьбы с советскими стратегическими подводными лодками.
Далее рассматривать авиацию мы не будем, так как с 80-х годов начинается внятная история беспилотных автомобилей.
Уже в 1930-х годах инженеры General Motors задумались об автономном управлении автомобилями. На выставке Futurama World’s Fair представители GM познакомили общественность с идеями о передатчиках, способных контролировать расстояние между автомобилями с помощью радиоволн. Второй идеей того времени были специальные дороги для беспилотников с углублением посередине. Машины двигались бы по дну, а при попытках выехать из ряда или заехать на обочину, они бы просто скатывались вниз.
Firebird II

Этот концепт-кар воплотил задумки спецов GM. Машина оснащалась магнитными датчиками, которые должны были принимать сигналы от электрических кабелей, проложенных под асфальтом. Такой подход не привел бы к полной автономности, но частично снимал нагрузку с водителя и давал автомобилю возможность в определенных случаях самостоятельно принимать решения о маневрах и изменениях скорости. И хотя в серию Firebird не пошел, по сути, именно он стал прародителем нынешнего круиз-контроля.
Стэнфордская тележка
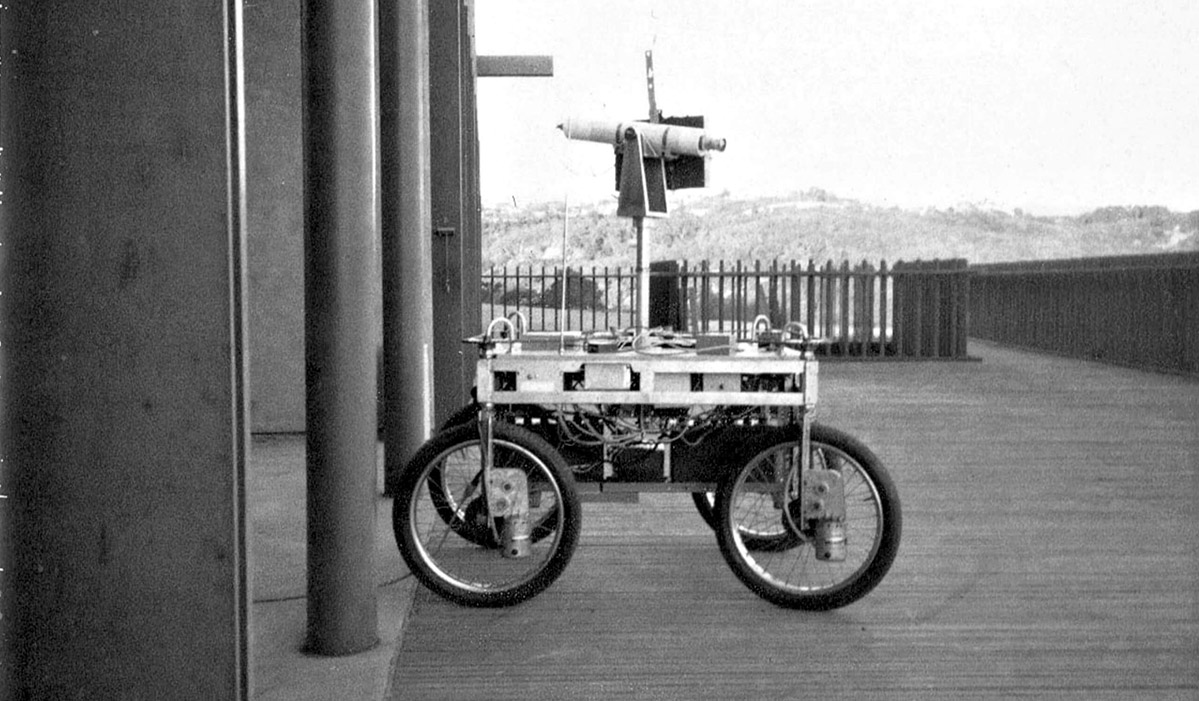
Разговоры о беспилотных авто начались еще в 1920-х годах, но первые первые реальные эксперименты приходятся только на 60-е. В 1961 году Джеймс Адамс, студент Стэнфордского университета, создал прототип самоуправляемой тележки. Первая модель работала от сигнала по кабелю, а второй прототип стал радиоуправляемым.
Спустя почти десятилетие математик Джон Маккарти «оттюнинговал» тележку, оснастив ее системой технического зрения, благодаря которой тележка могла двигаться частично автономно, ориентируясь на белую линию. В систему технического зрения вошли несколько камер, дальномер и четыре канала для сбора информации. Маккарти также пытался «обучить» тележку трехмерному картографированию обстановки.
Navlab

Спецы из американского института Карнеги-Меллона с 1980-х годов занимаются разработкой автономных и полуавтономных транспортных средств. В 1986 году они построили свой первый полуавтономный беспилотник — Navlab 1 на базе фургона Chevrolet. Название было образовано от «Navigation Laboratory» (лаборатория навигации). Navlab 1 был оснащен рулем, датчиками приводного вала и инерциальной навигационной системой для отслеживания положения.
В автомобиле было 5 стоек с компьютерным оборудованием, видеооборудование, GPS-приемник, сенсоры и суперкомпьютер Warp. Поскольку все это было установлено внутри автомобиля, ему удалось избежать узких мест телеметрии того времени: ложных показаний и зависимости от стационарной инфраструктуры. Система управления позволяла человеку включить автопилот. Наличие всего оборудования прямо на борту автомобиля позволяло исследователям собирать все данные на месте в процессе поездок.
Камеры Navlab 1 выводили обычное цветное изображение и изображение с диапазоном яркости. Благодаря этому система «видела», например, края дороги. Дальномер сканировал окружение и измерял расстояния с помощью лазера, предоставляющего трехмерную картину геометрии и отражающей способности среды. Бортовые компьютеры с архитектурой классной доски объединяли процессы всех систем — восприятие, отображение, планирование и управление. К сожалению, автомобиль страдал от ограниченности ПО, несмотря на то, что для 1986 года вычислительные мощности оборудования Navlab были революционными. И хотя Navlab 1 двигался крайне медленно (максимальная достигнутая скорость — примерно 32 км/ч), опыт с ним заложил основы разработок института Карнеги-Меллона в области автономных транспортных средств.
В 1990 году на базе армейского Hummer был построен Navlab 2, который оснастили тремя компьютерами Sparc 10 для обработки данных высокого уровня и двумя компьютерами на базе Motorolla 68000 для остальных нужд. Navlab 2 мог передвигаться по дорогам и бездорожью, правда на бездорожье его скорость ограничивалась 9,7 км/ч, в то время как по дороге он мог кататься на 110 км/ч!
В 1995 Navlab 5 на базе Pontiac Trans Sport совершил автономную поездку из Питтсбурга в Сан-Диего (впрочем 50 из 2850 миль были преодолены не на автопилоте, а под управлением человека) со средней скоростью 60 миль в час.
Prometheus Project
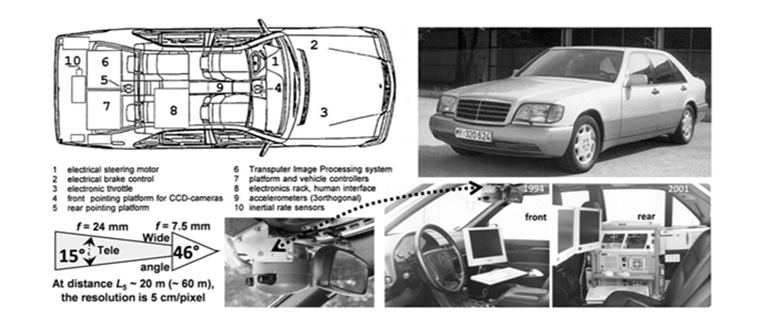
В начале 1980-х годов Эрнст Дикманс, один из пионеров компьютерного зрения и беспилотных автомобильных технологий, оснастил фургон Mercedes-Benz телематикой. 5-тонный фургон был переконфигурирован таким образом, что рулем, дроссельной заслонкой и тормозами можно было управлять с помощью компьютерных команд, основанных на оценке последовательности изображений в режиме реального времени. Было написано программное обеспечение, которое переводило данные датчиков в соответствующие управляющие команды. Из соображений безопасности, первые эксперименты проводились на улицах без движения.
В 1986 году автомобиль Robot Car «VaMoRs» смог ездить полностью автономно, а к 1987 году Дикмансу удалось разогнать его до 96 километров в час при управлении автопилотом.
Основной проблемой, вставшей перед Дикмансом и его командой, стал недостаток мощностей компьютеров. В то время компьютеры были не просто намного медленнее, чем сейчас: скорость обработки данных компьютеров 80-х составляла примерно 1% от 1% скоростей нынешней техники. Посему для реагирования в реальном времени необходимы были сложные стратегии компьютерного зрения. Команда Дикманса справилась с этой проблемой, разработав 4-D подход, при котором компьютеру не нужно было хранить предыдущие изображения для оценки всех трехмерных компонент положения, а также скорости.
В 1986-87 годах была запущена программа Прометей (PROMETHEUS, от PROgraMme for a European Traffic of Highest Efficiency and Unprecedented Safety, «Программа для европейского трафика с высокой эффективностью и беспрецедентной безопасностью»). Первоначально инициаторы программы собирались использовать скрытые кабели, но Дикманс предложил свое машинное зрение. В проекте приняли участие большинство крупных автомобильных компаний. В следующие 7 лет был достигнут значительный прогресс: роботы Дикманса научились ездить в разных условиях, водители, контролировавшие машины с автопилотом, убедились, что робот не может выйти из-под контроля и стать опасным, а с 1992 года автопилот стали испытывать на общественном транспорте.
В 1994 году состоялась заключительная презентация проекта, на которой переобуродованные Дикмансом из Mercedes-Benz S-Class автомобили Daimler-Benz (VITA-2) и UnBwM (VaMP) проехали более 1000 километров с гостями на борту по трехполосному шоссе со скоростью до 130 км/ч при стандартном трафике. Автомобили маневрировали и совершали обгоны, но все маневры утверждались присутствовавшим на борту страховым водителем.
Год спустя Mercedes проехал 1758 километров, достигнув на шоссе скорости свыше 175 км/ч. Не весь путь автомобиль проехал без вмешательства пилота, самым длинный длинный полностью автономный отрезок пути составил 158 километров (и это в 1995 году!). Особенно впечатляет, что в системе использовались черно-белые видеокамеры, и автомобиль не мог распознать, например, желтую разметку по цвету. 95% дороги автомобиль двигался полностью автономно.
Работы Дикманса опередили время. Многое из того, что он придумал больше 30 лет назад, используется в современных беспилотниках, например, фильтр Калмана, параллельные вычислительные механизмы, имитация саккадического движения глаз и, по сути, технология машинного обучения.
DARPA Grand Challenge

В 2004 году правительство США инициировало соревнования автомобилей-роботов, целью которых является создание полностью автономных транспортных средств. Эти соревнования стали очередным толчком развитию направления.
По правилам соревнований, автомобили не должны повреждать другие транспортные средства, дорожное покрытие и окружающую среду. Любое вмешательство человека в управление запрещено. Конкретный маршрут объявляется только за два часа до старта, и трасса может включать как дорогу, так и бездорожье, а также препятствия: канавы, бермы, колейные износы, песок, стоячую воду, камни, узкие тоннели и прочее.
Первый заезд оказался неудачным: уйти со старта смогли только 8 машин из 15, а весь маршрут не преодолел никто. Но с каждым следующим годом участники совершенствовали технологии.
А что сейчас?

Конечно, на слуху у всех Tesla со своим автопилотом, но беспилотники для массового рынка разрабатывают и другие большие компании — GM, Volkswagen, Audi, BMW, Volvo, Nissan. Отдельно упомянем технологические компании — например, Яндекс, Гугл (Waymo) и Убер. Во-первых, они и сами охотно делятся информацией о своих разработках, а во-вторых, их подходы существенно отличаются от подходов автопроизводителей.
Многие разработчики решений для беспилотников для своих опытов используют Toyota Prius: встроенные электронные блоки управления этого автомобиля позволяют управлять практически всем, от ускорения и торможения до переключения передач. Кроме того, подключиться к системам управления Prius довольно легко.
С модификации приусов начинали и Google (в последствии — Alphabet). Автомобили Waymo используют информацию, собранную сервисом Google Street View, видеокамеры, лидар на крыше, радары в передней части автомобиля и датчик на одном из задних колес, благодаря которому определяется позиция авто на карте.
В 2013 спецы Google начали разработку концепта полноценного «беспилотника будущего» без руля, педалей и каких-либо других систем управления человеком — Firefly. Но компания столкнулась с тем, что для быстрого создания большого парка беспилотников необходима серийная модель.
Яндекс занялся беспилотниками поздно: только в середине 2017 года. Зато благодаря тому, что к этому времени у других разработчиков накопился приличный опыт, Яндекс обошел многие грабли. Как и Google, для своих разработок Яндекс использует Prius.
Тестируются робомобили на закрытом полигоне, на улицах Сколкова и Иннополиса и на симуляторе. В июне 2018 года беспилотник «Яндекса» впервые преодолел длинный маршрут: робомобиль проехал 789 км из Москвы в Казань за 11 часов, и 99% пути были преодолены на автопилоте.
Разработкой робомобиля занимается также Uber. Но водителям-испытателям Uber приходилось перехватывать управление чаще, чем коллегам из конкурирующих компаний, особенно, вблизи строек и грузовиков с высокими бортами. В среднем беспилотники Uber в автономном режиме преодолевали не более 20,9 км.
18 марта 2018 года робомобиль Uber насмерть сбил велосипедистку из-за сбоя в программе: электроника приказала машине игнорировать посторонние объекты на трассе. Водитель-испытатель не успел заметить женщину и перехватить управление, так как она переходила дорогу в неположенном месте. После случившегося компания временно остановила тесты своих автомобилей. Сейчас испытания возобновлены. Для повышения безопасности Uber стали сажать в автомобили сразу двух пилотов, а также добавили систему мониторинга состояния водителя.
Что будет дальше?
Взгляды на будущее беспилотников разнятся. В «Яндексе», например, считают, что беспилотники станут массовым явлением и заменят личный транспорт. Такси и каршеринги станут единым сервисом, модель пользования автомобилем полностью изменится. А ждать такого будущего, по мнению компании, можно уже через 3-5 лет.
А вот Стив Возняк считает, что до беспилотного будущего нам еще очень далеко. По его мнению, к беспилотникам не готовы не только технологии, но и вся дорожная инфраструктура, а существующие технологические наработки слишком несовершенны.
Интересен не только вопрос скорого или нескорого внедрения технологий в повседневную жизнь. Профессор Университета Суррея Скотт Коэн порассуждал о том, какие роли беспилотники будут выполнять. И пришел к выводу, что они станут передвижными борделями, барами и притонами.
Нам же, обывателям, остается только ждать и делать ставки, какие прогнозы окажутся самыми близкими к действительности.
